长按识别二维码阅读全文
煤矿智能快速掘进关键技术研究现状及展望
依据国际能源署 (IEA) 最新发布的预测报告显示,未来我国的煤炭资源需求在可用能源占比中仍起到主导地位,预计到2040年国内煤炭需求量约占国际能源的一半,其中井工煤矿资源占比约为煤炭总资源的80%,井工煤矿开采主要遵循着“采掘并重,掘进先行”原则。智能化掘进建设是煤矿智能化矿山建设的 重要组成部分,是保障掘进作业安全、高效,解决煤炭生产中掘采比失调的重要技术手段。
2020 年国家发改委、能源局等八部委联合印发了《关于加快煤矿智能化发展的指导意见》及《煤矿重点研发机器人目录》等文件,明确了在 2030 年前基本实现重点矿区工作面无人化开采作业。为促进我国煤矿机器人研发应用与煤炭开发的智能化水平,国家矿山安全监察局提出通过建立“国家矿山机器人协同创新中心”、研发示范基地等措施来引导矿山装备智能化与机器人技术发展。并将矿井掘进机器人列入《煤矿机器人重点研发目录》,极大的促进了智能化掘进作业进程。截至目前我国已累计建成1277个具备智能化掘进功能的掘进工作面,国内外的高校、研究院所、装备制造企业和煤炭生产企业的专家学者做了大量的创新性工作,为智能化掘进提供了理论技术支持与工程实践。但智能快掘是系统工程,需结合地质条件特征,深度融合新一代智能化技术,多设备高效匹配联合作业才能实现智能快速掘进。笔者以掘进设备分类情况为主要脉络,分析并论述了智能快掘系统的装备配套以及关键技术的现状与发展趋势, 针对现阶段存在的掘进−支护−锚固−运输协同作业效率低、“掘锚比失衡”等主要挑战,提出掘进装备精确定位导航技术、自主定型定向截割技术、掘进机远程自主截割控制技术、多机多工序协同控制技术等关键技术并给出研究方向。

图 1 连续采煤机及配套装备
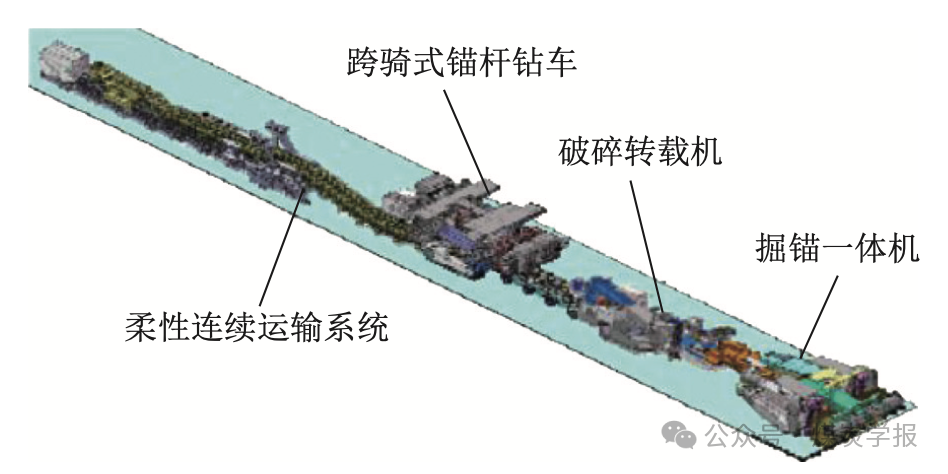
图 2 掘锚一体机成套装备配置

图 3 煤矿快掘成套装备配置

图 4 QJYC045M 型煤矿全断面硬岩掘进机
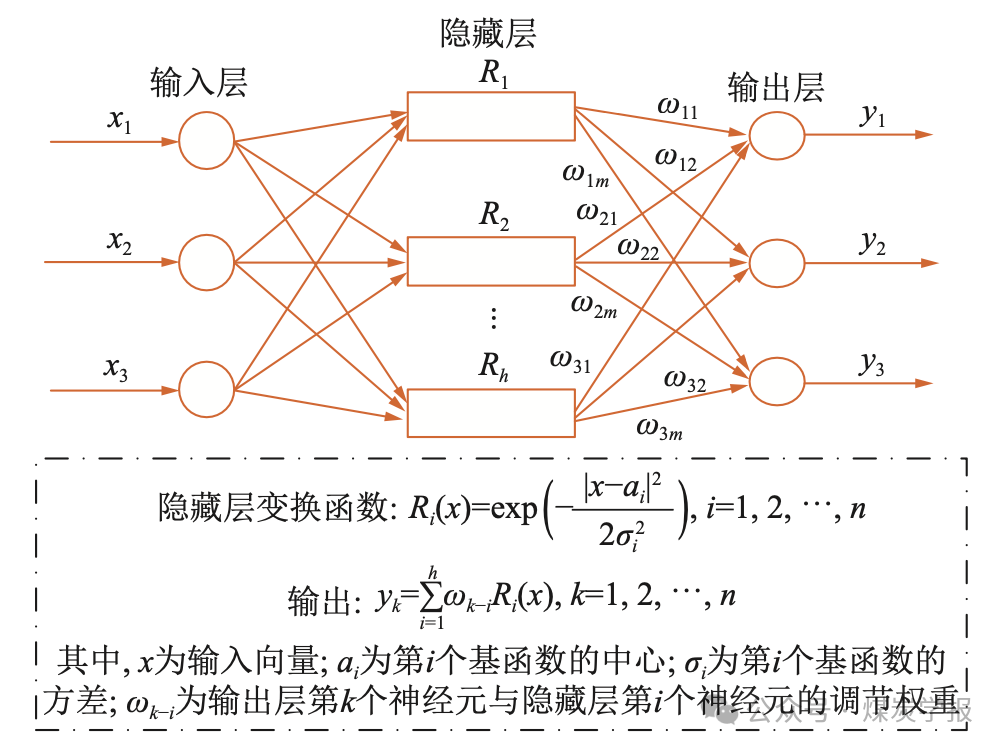
图 5 RBF 神经网络

图 6 设备参数感知
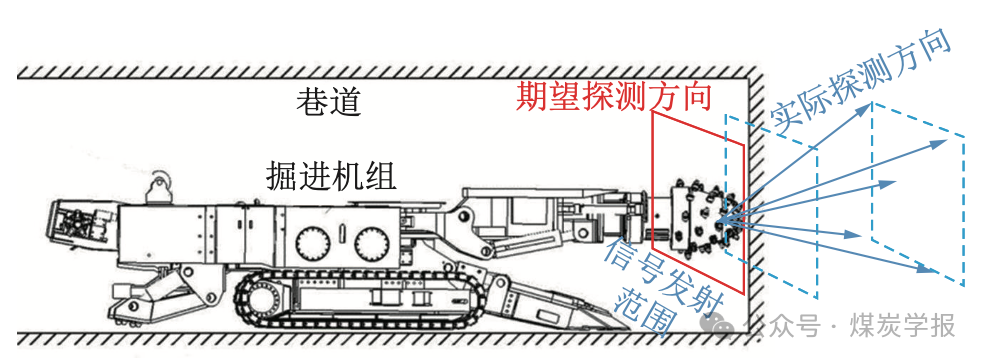
图 7 钻探+物探融合探测示意

图 8 三维地震勘探对地质体的识别

图 9 三维地震勘探对地质构造的预测
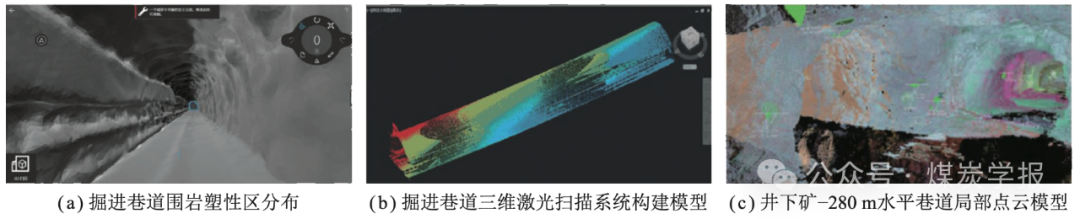
图 10 巷道三维建模技术
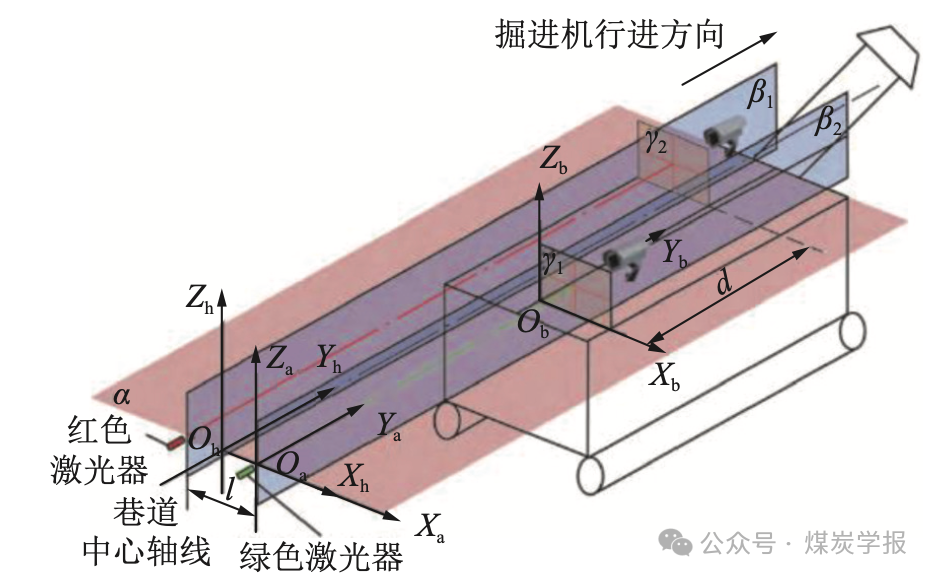
图 11 基于机器视觉的位姿监测系统
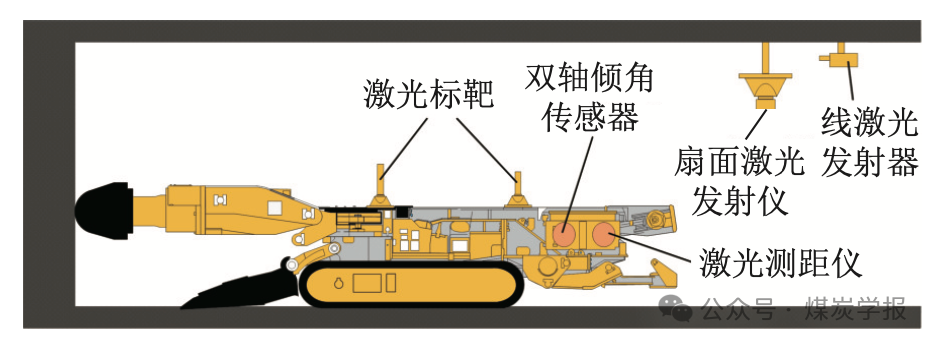
图 12 基于线结构光的掘进机位姿检测系统
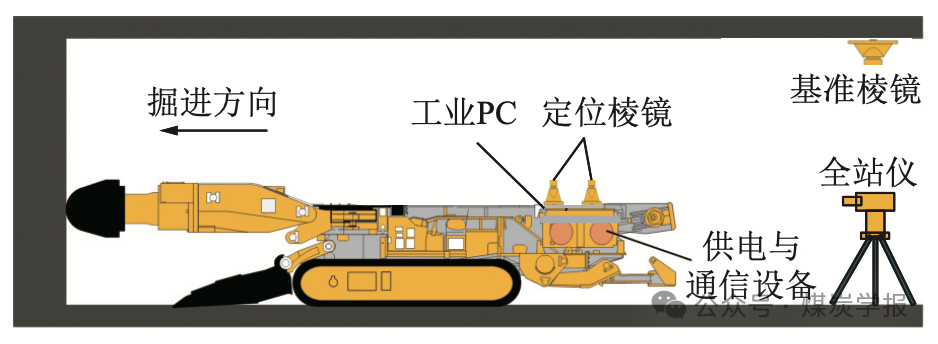
图 13 掘进装备位姿监测系统
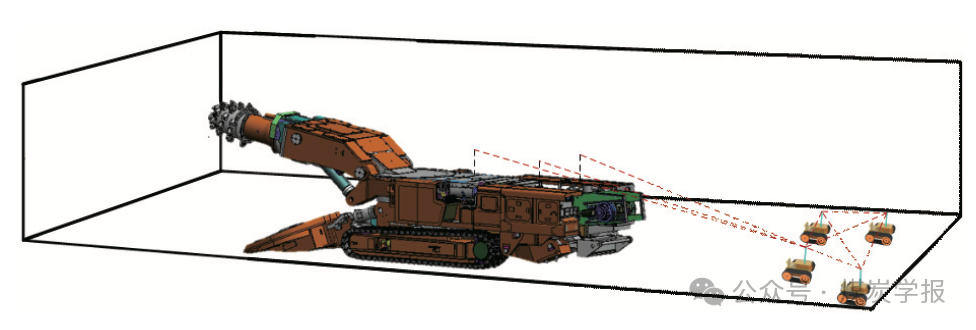
图 14 传感器与执行器布置情况
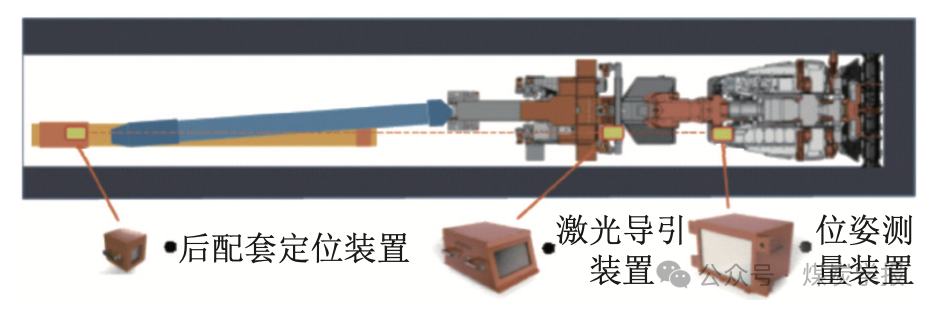
图 15 掘锚一体机高效掘进系统定位导航元件布置
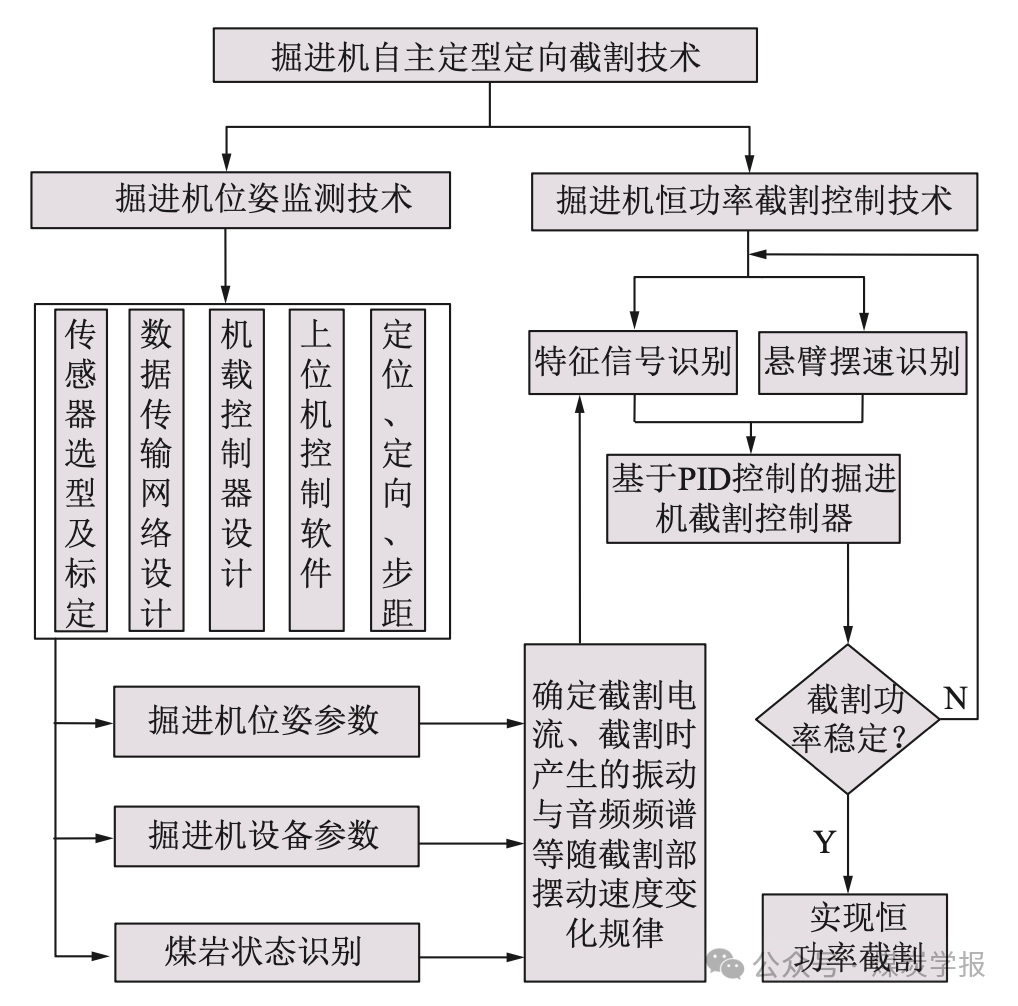
图 16 恒功率截割控制原理
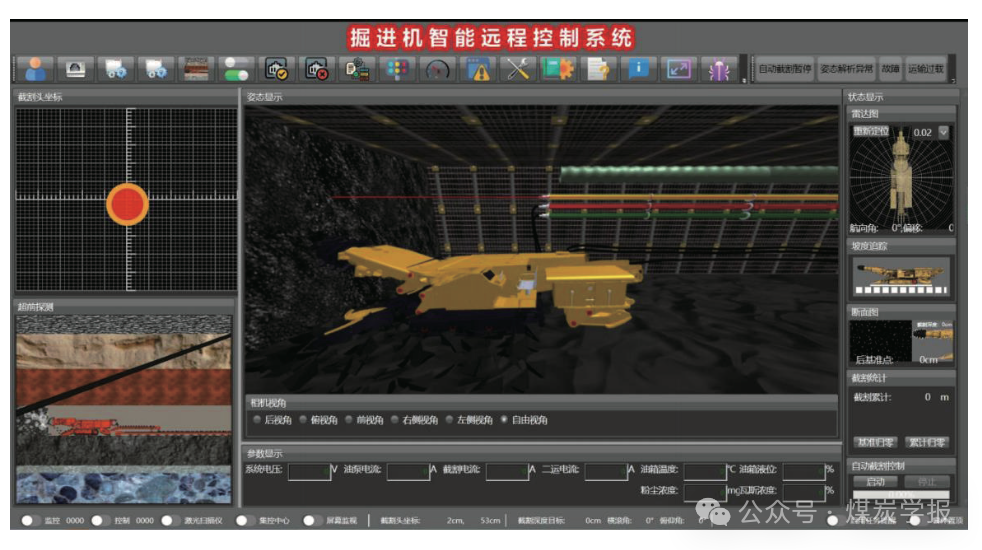
图 17 掘进工作面精准地质保障系统

图 18 掘进设备远程智能控制系统架构

图 19 新型掘支锚并行快速掘进系统
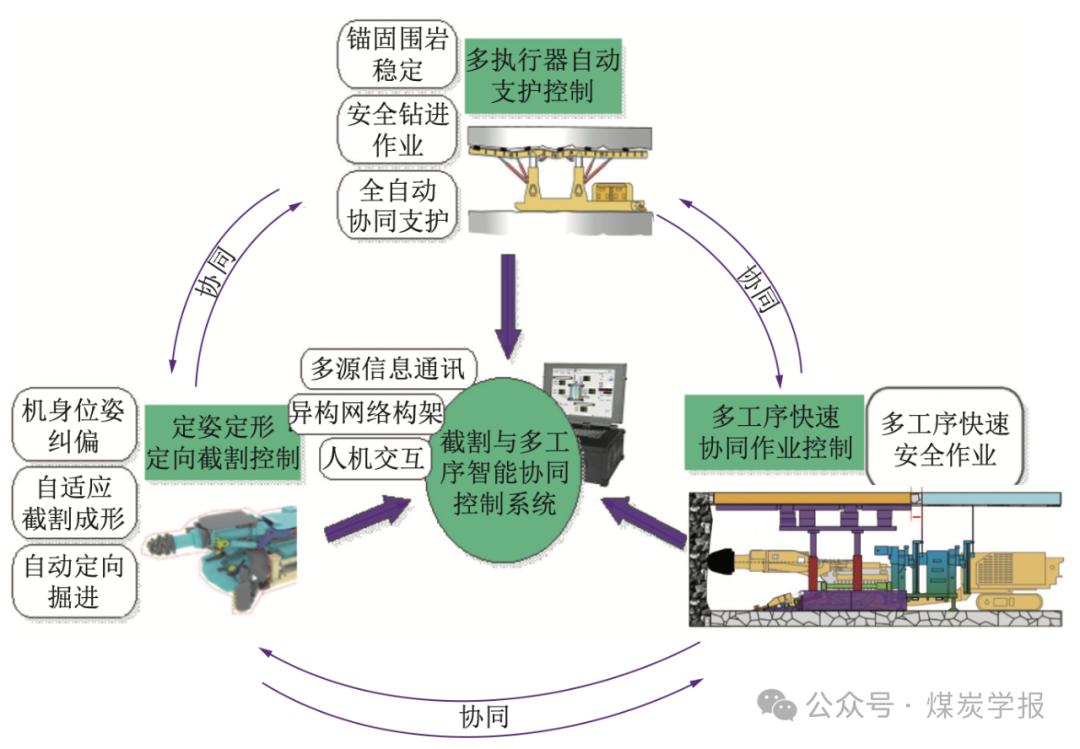
图 20 多工序机器人柔性协同作业智能控制架构
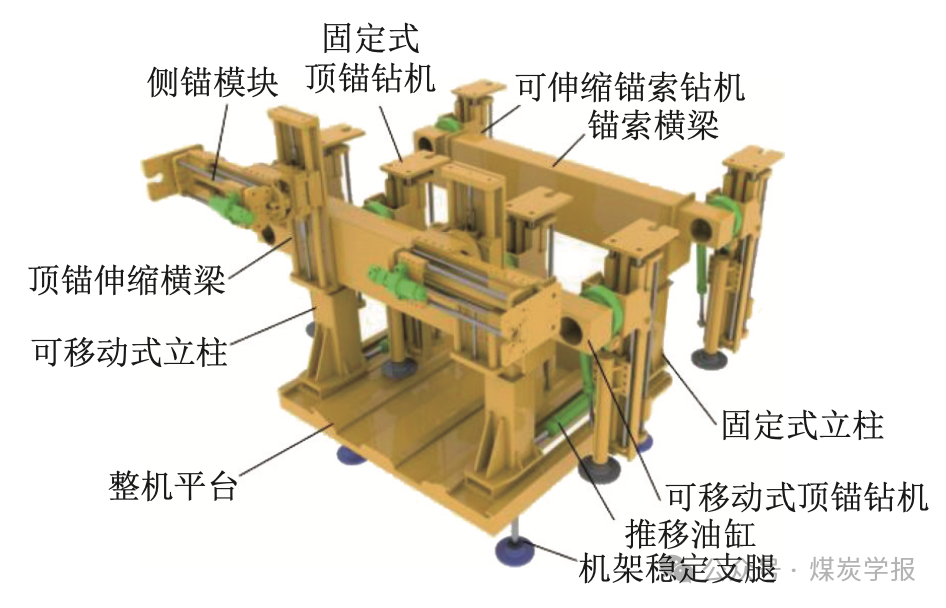
图 21 锚固钻机部方案示意
![]()
图 22 综掘工作面顶板多级柔性支护结构
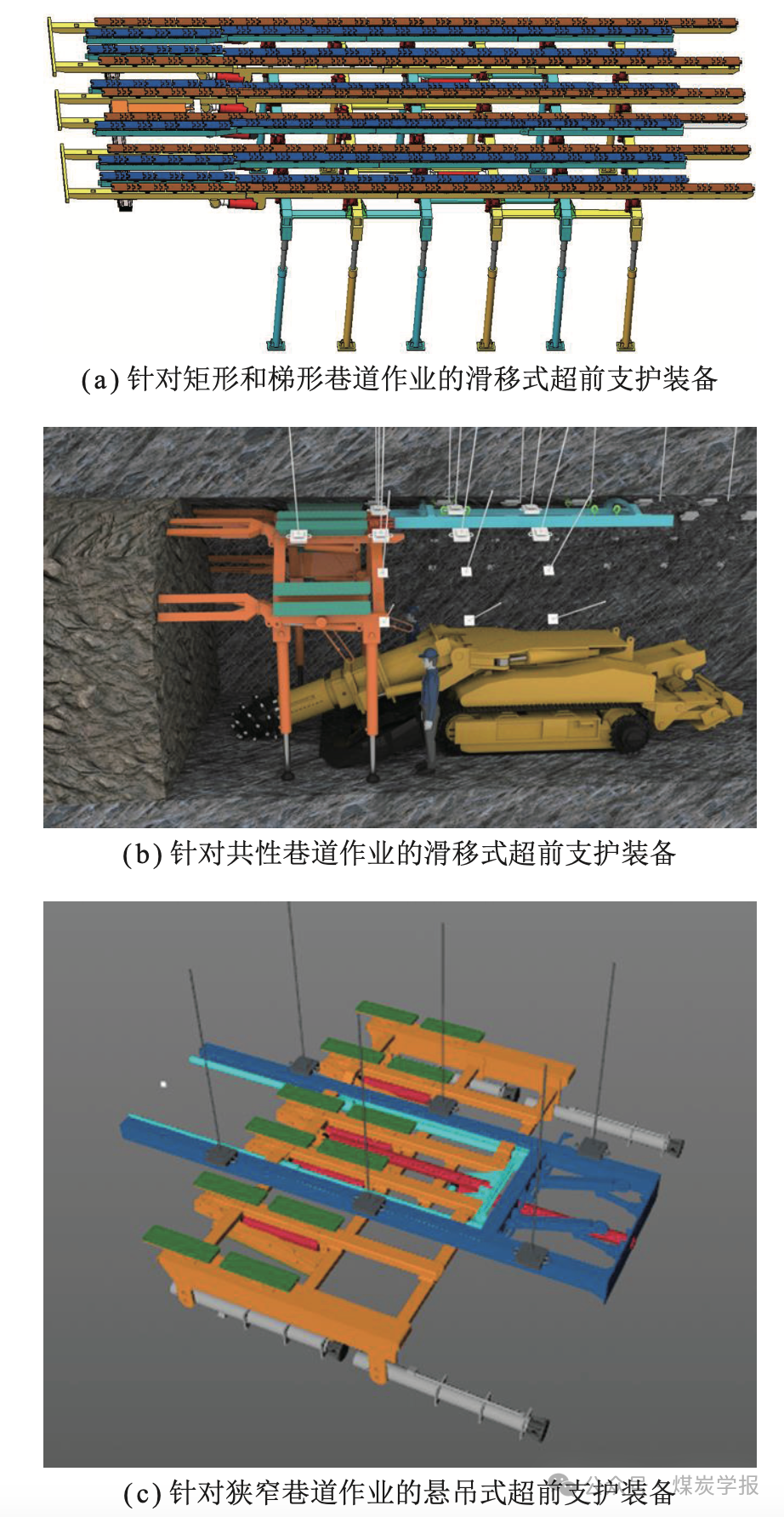
图 23 不同工况下超前支护装备
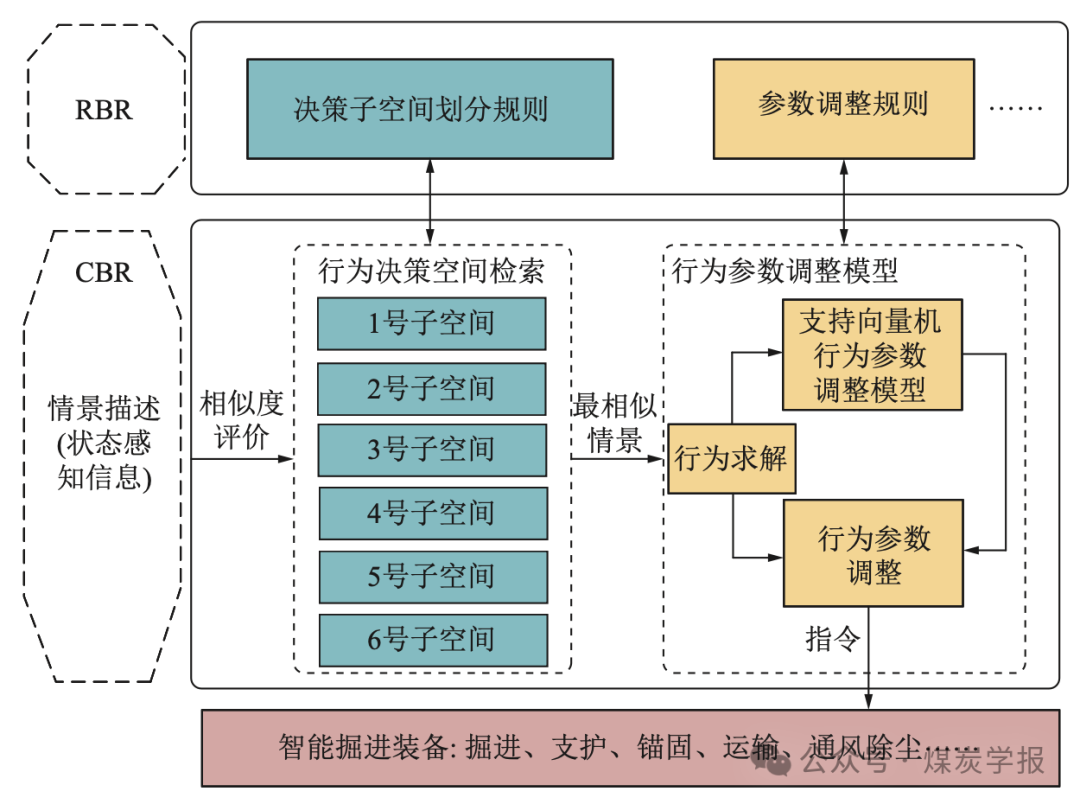
图 24 掘进装备多机多工序行为决策混合推理流程

毛君,男,1960年9月生,辽宁工程技术大学机械设计及理论博士点学科带头人,教授,博士生导师。兼任国家安全生产专家,国家“653工程”煤炭行业机电工程领域首席专家,中国工程机械学会矿山机械分会副理事长,中国煤炭机械工业协会委员会专家,中国矿山机械教学研究会副理事长,辽宁省机械工程学会理事,辽宁省振动工程学会理事,德国华人机电协会会员,辽宁省教育厅高校创新团队带头人,入选辽宁省“百千万”人才工程百人层次,获全国煤炭工业先进工作者称号,获得全国“五一”劳动奖章、国务院政府特殊津贴。《辽宁工程技术大学学报》《煤矿机械》编委。获省部级奖励30余项,出版专著与编写教材共计15部。发表学术论文200余篇,其中被SCI、EI、ISTP检索多篇;申报国家发明专利80余项,已授权发明专利33项,申报国家实用新型专利100余项,已授权实用新型专利48项;完成新产品技术转化十余项。
研究方向
现代机械设计理论与方法、先进制造系统与技术、机电一体化系统与技术、工矿装备自动化与智能化
主要成果
致力于综掘成套装备理论与技术—煤矿巷道快速掘进技术的研究,取得多项创新性成果,研发掘支锚运并行作业系统,为煤矿提供了首选的、安全高效的掘进技术;在综采成套设备关键技术方面,主持完成了我国自主建设的世界首个煤矿采掘装备研发中心,该项目首创国际模拟工况下成套装备的力学测试与分析系统,为后续国家重大科技研发项目提供了技术支撑,为大型采掘机械装备提供了检测和实验的先进技术服务平台。

杨润坤,男,1995年8月生,博士研究生。近年发表学术论文10余篇;获得省部级科学进步三等奖2项,申请国家发明专利8项,参与编撰学术专著2部,参与完成国家级、省部级科研课题以及煤炭行业智能化矿山建设项目7项。
研究方向
综掘、综采成套装备理论与技术、工矿装备自动化与智能化
主要成果
致力于综掘成套装备理论与技术,完成了煤矿巷道智能快速掘进系统研发,为煤矿提供了首选的、安全高效的智能化掘进技术;致力于综采运输设备关键技术研究,探索提出综采工作面刮板输送机链传动系统故障监测技术方案,建设了智能化监控平台,为智能化煤矿建设提供支撑。
来源:
毛君,杨润坤,谢苗,等. 煤矿智能快速掘进关键技术研究现状及展望[J]. 煤炭学报,2024,49(2):1214−1229.